基于FPV飞行技术的耐张线夹无人机数字射线检测技术
作者简介:
岳贤强(1991—),男,硕士,工程师,主要从事输电线无损检测技术的研究工作
输电线路耐张线夹承受输电线路整个耐张段的导线张力,并承受工作电流,其压接质量直接关系到输电线路的安全稳定。耐张线夹存在压接质量缺陷易导致局部发热、导线损伤、金具或导线断裂甚至掉线[1-2]。
耐张线夹压接质量的常用检测方法有X射线法(胶片、数字射线)[3-5]、外形尺寸测量法[6-7]、超声波探伤法[8-10]等。对于输电线路耐张线夹的定期检测,常采用数字射线法,其通过运检人员登塔出线的方式,将数字射线检测(DR)系统挂载在耐张线夹处,通过远程操控、检测图像实时回传的方式实现质量的检测。但这种人工作业方式存在高坠风险大、辐射防护困难[11]、作业效率低等弊端。
近年来,无人机挂载光学相机、红外成像、激光雷达等载荷装置对导线、绝缘子、金具等输电设备进行巡检工作已成为架空输电线路不可或缺的日常运维手段[12]。随着数字射线检测技术的不断发展,脉冲式X射线机趋于小型化、轻量化,且可由电池供电,具有可以远程无线操作、数字成像板和射线机可以联动控制的优势。硬件设备的发展必然带来作业方式的变革,采用无人机挂载数字射线检测系统对在役输电线路耐张线夹压接质量进行检测是解决人工登塔作业高坠风险难题的一种途径。谭兴华等[13]提出基于无人机与X射线数字成像技术的输电线路耐张线夹检测方法,但并未在文章中提到所用无人机、数字射线设备信息,也未展示无人机检测过程资料。白洋等[14]设计了搭载于无人机上的小型X射线成像检测系统,但未用于实际工程应用。张国鲲等[15]对无人机及DR系统电磁屏蔽进行了试验与分析,结果表明线夹带电X光检测系统的电磁防护措施是有效的,为线夹带电X光检测应用打下了坚实基础。
笔者提出了一种基于“无人机+数字射线”的在役输电线路耐张线夹压接质量检测技术,设计并制作了用于多旋翼无人机搭载的专用工装,采用基于FPV飞行技术辅助挂载的方式,实现了人工作业替代,并进行了工程应用,实现了安全和效率的双重提升。
1. 耐张线夹压接质量数字射线检测技术
1.1 数字射线检测原理
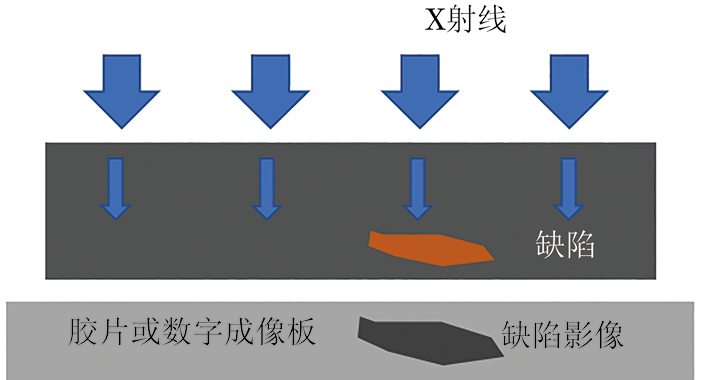
射线在穿透物体过程中会与物质发生相互作用,因吸收和散射而使其强度减弱。强度衰减程度取决于物质的衰减系数和射线在物质中穿越的厚度。如果被照物体的局部存在缺陷,该局部区域的透过射线强度就会与周围的射线强度存在差异。检测成像后缺陷部位和完好部位的透射射线强度不同,影像相应部位就会出现黑度差异。射线检测原理如图1所示。
从获得的图像角度可以将射线检测技术分为常规射线检测技术和数字射线检测技术。跟射线照相检测技术相比,数字射线成像检测技术有以下优点:① 无需冲洗胶片,可以直接获得检测结果图像;② 图像显示质量高,动态范围远大于射线照相技术的,并且可以对数字图像进行各种处理;③ 检测时间短,降低了射线的照射剂量;④ 数字成像系统具有很大的宽容度,对于厚度变化范围大的工件或设备,可以实现一次透照成像;⑤ 数字图像便于存储和后期检查;⑥ 可实现网络化操作,比如远程操作、远程评片、多人同时评片、底片共享等。
1.2 耐张线夹的数字射线检测
耐张线夹有压缩型、螺栓型、楔型、预绞式四种结构型式。耐张线夹的工作原理是采用不同方式增大线夹和导线的摩擦力,以实现将导线张紧的功能。其中,压缩型线夹需要将钢锚与导线内部钢芯压接、铝管和导线外层铝线压接,使线夹和导线成为整体。从工作原理上来看,压缩型线夹在安装过程中会有较大机械变形,且缺陷相对更隐蔽,需要在安装过程、运行期间进行内部缺陷的检测。
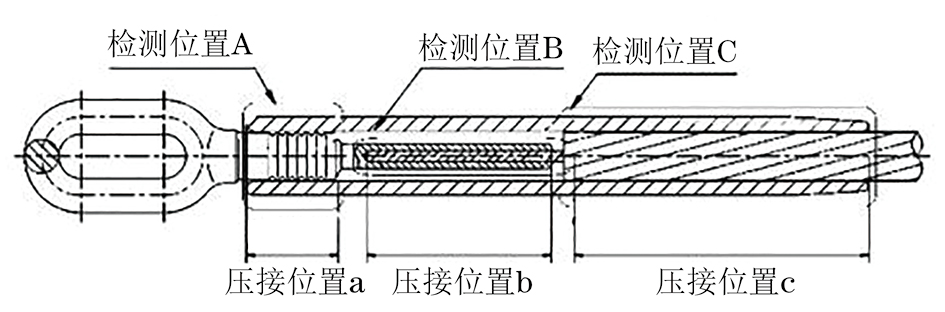
压缩型耐张线夹结构如图2所示,按压接位置可以分为A,B,C三个区域(部分标准按照1,2,3区域划分),其中A区为钢锚防滑槽与铝管压接区,B区为不压区,C区为导线与铝管压接区。
耐张线夹压接质量射线检测工艺依据国网企标Q/GDW 11793—2017《输电线路金具压接质量X射线检测技术导则》执行。
2. 无人机挂载专用工装设计
采用无人机替代人工作业,首先要考虑无人机的承载力和续航时间,其次要通过专用挂载工装的结构设计来降低飞手操作难度,最后尽可能适应不同塔型、不同导线的检测。
2.1 设备选型
2.1.1 多旋翼无人机选择
由于DR检测系统和专用工装质量较大,整套检测装置质量可达10~15 kg,故需要选择大载重无人机。目前大载重无人机多用于快递运输、农业植保等领域,综合考虑价格等因素,可以针对市面上的植保无人机进行改装。
国内植保无人机排名靠前的生产厂家有大疆DJ、极飞XAG、全丰航空、拓攻TopGun、极目EAVISION等。结合现有资源,笔者对比分析了大疆T40、拓攻TG26两种型号植保无人机,其具体参数如表1所示。
| 参数 | 大疆T40 | 拓攻TG26 |
|---|---|---|
| 整机重量/kg | 38(不含电池) 50(含电池) | 24.2(不含电池) |
| 最大起飞重量/kg | 90 | 59.5 |
| 最大轴距/mm | 2 184 | 2 034 |
| 外形尺寸(机臂展开,桨叶展开)/mm | 2 800×3 150×780 | 2 660×2 474×780 |
| 悬停精度/cm | 启用RTK定位:水平±10,垂直±10 | 启用RTK定位:水平±10,垂直±10 |
| 满载悬停时间/min | 9 | |
| 最大飞行半径/m | 2 000 | - |
对比分析发现,大疆T40型植保无人机在最大起飞质量方面具有优势,但满载悬停时间略短,其他参数相差不大。综合考虑设备价格、改装难易程度等,最终选择拓攻TG26型植保无人机。
2.1.2 数字射线系统选择
(1)脉冲射线机
DR检测系统主要包括数字成像板、脉冲射线机、移动工作站、信号传输设备、电池以及其他配件等。其中脉冲射线机是产生X射线的设备,数字成像板是接收穿过被检件的射线并将其转化为图像信号的设备,是项目中的关键设备。
在我国数字射线检测产品市场,进口厂商占据了主要高端市场,国内生产厂商主要占据中低端市场。在工业应用领域,各厂商产品以工频射线机为主,便携式脉冲射线机以美国高登的XR系列为主,其常见脉冲射线机型号及参数如表2所示。
| 型号 | 生产厂家 | 最高电压/kV | 重量/kg | 供电方式 | 备注 |
|---|---|---|---|---|---|
| XRS 150 | 美国高登(Golden) | 150 | 2.42 | 电池 | 无线遥控 |
| XRS3 | 美国高登(Golden) | 270 | 5.4 | 电池 | 无线遥控 |
| XRS4 | 美国高登(Golden) | 370 | 8.3 | 电池 | 无线遥控 |
考虑射线机穿透力及质量,选择XRS3型脉冲射线机。
(2)数字成像板
数字成像板的功能是接收X射线信号并将其转化成数字化的图像信号,通过无线方式传输给地面的移动工作站,从而实时显示耐张线夹内部结构。文中采用京东方1417型数字成像板,其有效成像尺寸为443 mm×365 mm(长×宽),无线传输距离不低于100 m,质量约3 kg。
2.2 工装设计
设计专用挂载工装时应遵循以下原则:① 结构尽量简单,在减轻质量的同时还应避免其被导线、金具等勾缠住;② 适应不同类型导线,避免垂直双分裂导线的下方导线的遮挡;③ 通过结构设计降低挂载时的操作难度;④ 可在地面起降,无需专用起落架;⑤ 成像板等脆弱部位要加强防护;⑥ 适用于不同DR检测系统,有一定通用性。
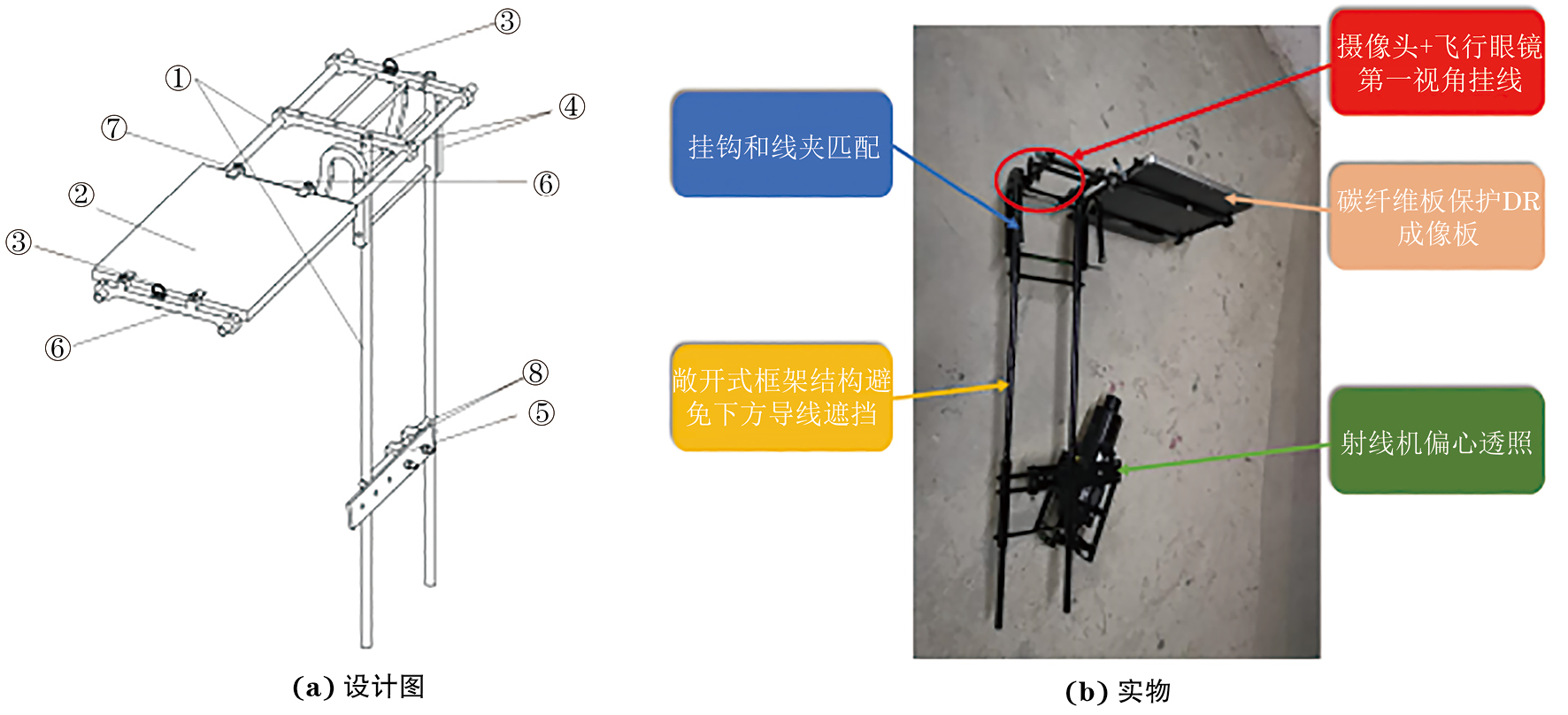
基于以上考虑,设计并加工制作了用于无人机挂载的专用装置(见图3)。图3中①为开放式结构主体,②为数字成像板保护组件,③为可移动挂耳,④为防脱挂钩,⑤为脉冲射线机挂载组件,⑥为可移动横担,⑦为成像板固定件,⑧为倾斜滑块。经称量,该结构质量约为5.3 kg。
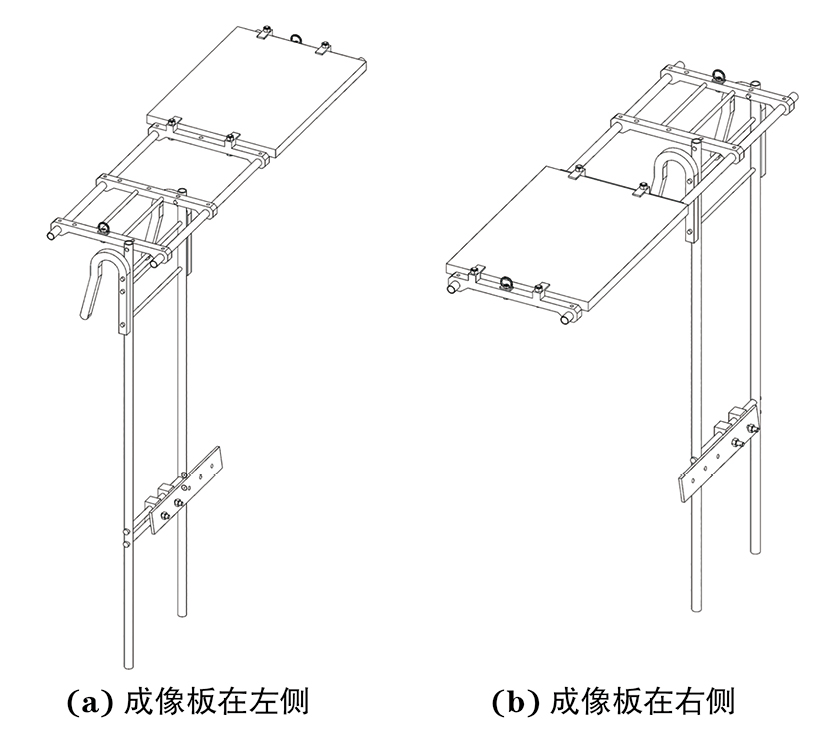
由于采用了倾斜照射的方式,在检测耐张塔大号侧和小号侧耐张线夹时,需要无人机飞到导线的不同侧挂载。如检测同塔双回线路左线小号侧线夹(从小号侧面向大号侧,左侧线路)时,无人机从导线左侧靠近导线并将整套检测装置挂载在导线上。检测左线大号侧线夹时,就需要从导线右侧靠近导线,也就是说无人机需要从同塔双回线路中间穿过,安全风险较大。为避免这种风险,专用挂载装置有两种组装方式(见图4),变更组装方式时仅需将上半部分拆卸下来更换一个方向即可。
该专用挂载装置和多旋翼无人机之间通过软绳连接,射线机和数字成像板都经过了加固保护,可以在地面、农田等环境下垂直起降。多旋翼无人机射线检测过程如图5所示。

2.3 FPV飞行技术
由于耐张线夹数字射线检测的特殊性,需要将检测装置挂载在导线或耐张线夹上,使数字成像板紧贴待检测耐张线夹。由于整套装置体积、质量都较大,如何克服天空背景下存在视觉误差、距离估算难度大等困难,在不触碰输电铁塔或导线前提下,操作翼展较大的无人机将检测装置精确挂载在导线或耐张线夹上成为制约耐张线夹无人机射线检测的难题之一。
第一人称视角(FPV)飞行技术是通过无人机搭载实时第一视角图像模块辅助控制无人机飞行的一种技术。采用第一人称视角的飞行模式,可以提供给无人机操作手更为直观的图像,更大的视场角和更强的操作性,方便无人机操作手在临近设备时进行观察和避障[16]。
笔者采用了FPV飞行技术辅助挂载,所用的飞行眼镜及佩戴演示如图6所示。

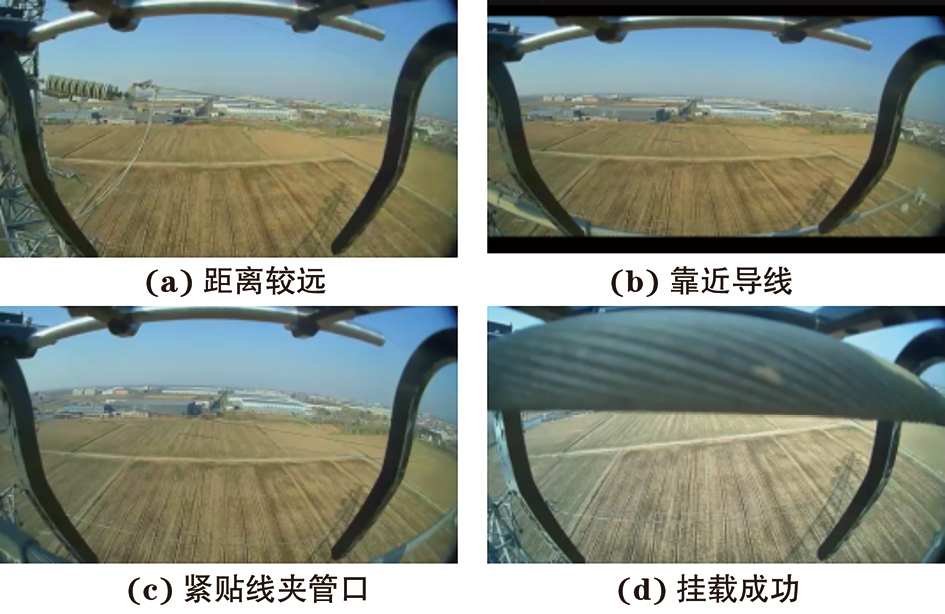
在实际检测过程中,无人机操作手首先操作多旋翼无人机,提升其高度至待检测线夹附近,然后佩戴FPV眼镜,以第一视角操作无人机将检测装置挂载在导线上。专用挂载装置经过结构设计,当左侧挂钩紧贴耐张线夹管口处时,数字成像板刚好可以覆盖住线夹待测部位,第一视角挂载及检测过程如图7所示。
3. 工程应用
3.1 相线线夹停电检测
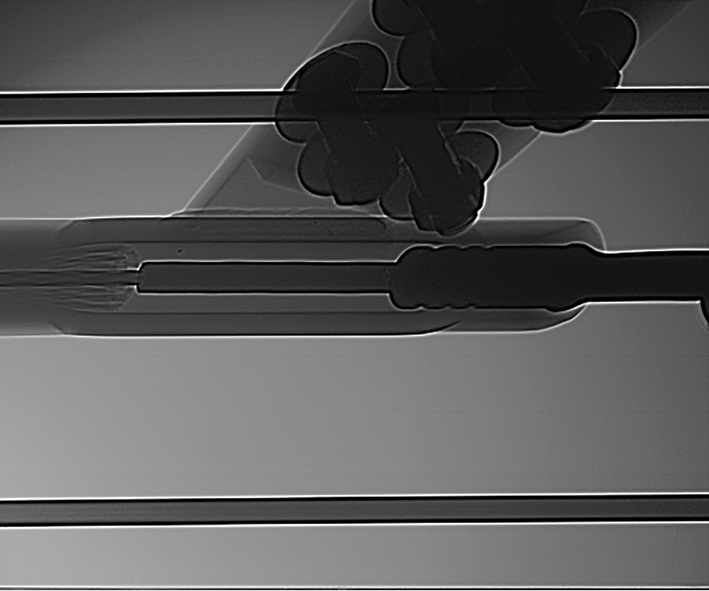
经过试验验证检测可行性后,结合停电检修在多条220 kV、110 kV输电线路上进行了工程应用,共检测线夹63个,发现存在缺陷线夹15个。某线夹停电工况下的射线检测结果(未处理)如图8所示,图中上下两根横向影像为专用挂载装置的支撑钢管结构,可以看出该线夹存在的缺陷为防滑槽漏压两槽。
3.2 地线线夹带电检测
某1 000 kV线路在日常巡检中发现#211号塔地线压接式耐张线夹外表面铝合金存在开裂、剥落现象。为确定线夹内部钢锚是否存在弯曲、损伤、腐蚀减薄等缺陷,对该地线线夹进行了带电检测。由于该线夹长度较长,采取分段检测方式。地线线夹实物、检测过程及结果如图9所示。
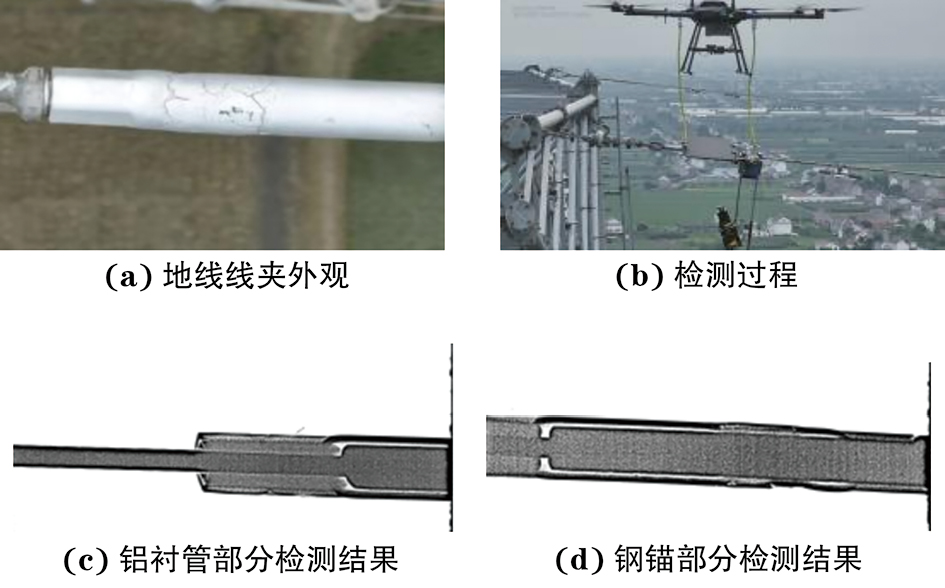
从检测结果来看,其铝衬管部分及外部线夹铝管处无明显开裂、缺失等现象,钢锚压接部分无明显变形、开裂现象,但外部线夹铝管存在明显缺失现象,和目视检测结果一致。
4. 技术对比
前文介绍了笔者研制的专用检测工装,并进行了试验验证和工程应用,取得了良好的成效。但无人机检测过程中,飞机旋翼会带来一定的扰流振动,且工装结构设计时采用了偏心透照法,可能会影响数字射线成像质量,因此有必要对“无人机+数字射线”作业方式和传统登高作业方式进行技术对比。
4.1 检测质量对比
采用前述的射线机和数字射线成像板,分别以无人机作业的倾斜透照方式和人工登塔作业的垂直透照方式对同一个耐张线夹进行检测。为了验证检测灵敏度,采用了铝合金13号线型像质计,即像质计线号为13-19(13号像质计丝直径为0.20 mm,19号像质计丝直径为0.05 mm),像质计置于成像板侧。其垂直透照与倾斜透照的检测结果对比如图10所示,可以看出,该耐张线夹钢锚防滑槽存在1处漏压,为严重缺陷;管口处铝线存在松股,为一般缺陷;两种技术成像质量相差不大,均能看到完整的19号像质计。

4.2 检测效率对比
传统人工登高检测作业,需要2名登高人员登塔作业,2名地面辅助人员协助起吊检测设备,1名射线工作人员操作射线机进行检测作业。不同基塔的检测时间和铁塔类型、耐张线夹类型有关,一般情况下检测一座基塔平均需要1~2 h。
“无人机+数字射线”检测作业,需要2名飞手,1名射线工作人员操作射线机进行检测作业。根据工程应用经验来看,1块电池续航时间约8~10 min,预留出约30%电量用于返航,1次飞行用于检测的时间约7 min,可以完成3处耐张线夹检测。对于单分裂线夹,完成1座基塔的检测约需要15 min。人工登高与无人机作业方式对比如表3所示。
| 指标类型 | 对比内容 | 作业方式 | ||
|---|---|---|---|---|
| 人工登高作业 | “无人机+数字射线” | |||
| 技术指标 | 透照方式 | 垂直透照 | 倾斜透照 | |
| 灵敏度 | 19号像质计 | 19号像质计 | ||
| 缺陷检出情况 | 检出 | 检出 | ||
| 技术门槛 | 低,需要有经验登高人员 | 高,需要有经验飞手、专用装置 | ||
| 经济指标 | 检测人员数量 | 5名 | 3名 | |
| 作业时间(单分裂、两侧) | 1~2 h | 15 min | ||
| 安全指标 | 作业风险点 | 人员高处坠落、辐射事故风险 | 无人机坠机风险 | |
5. 局限性及发展方向
5.1 铁塔类型局限
笔者采用的检测装置理论上适用于不同塔型、不同分裂导线的检测,但由于射线检测需要一定焦距,检测装置和无人机通过柔性连接,整套装置长度较长,在检测不同塔型的线夹时存在一定局限性。输电线路常见塔型如图11所示。
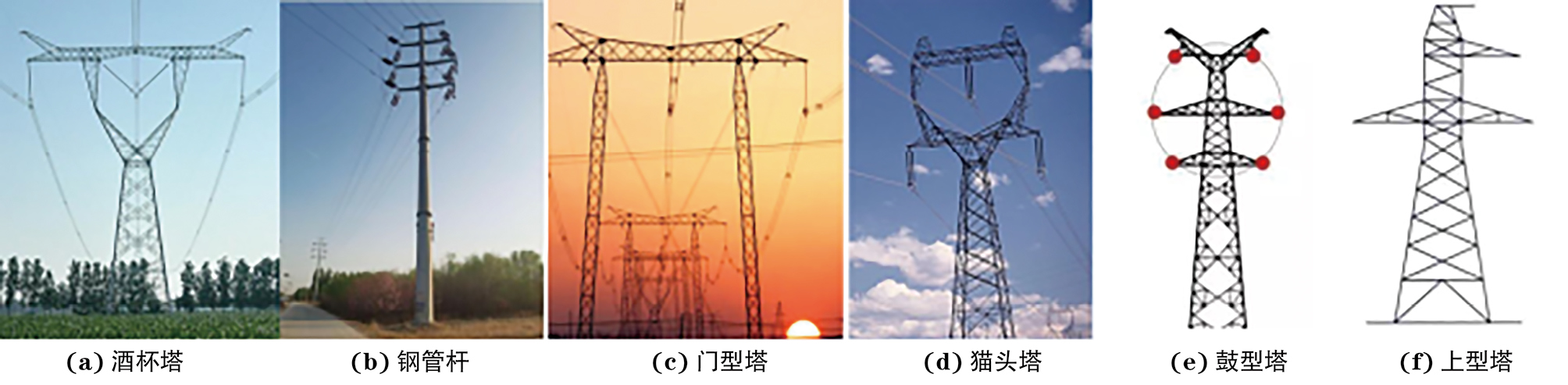
从塔型、导线分布情况看,酒杯型、猫头型、上字型、门型等塔型比较适合无人机巡检,110 kV及以下输电线路所采用的鼓型塔和钢管杆的导线上下分布或间距过近(约为3 m),无人机巡检存在困难,220 kV及以上输电线路所采用的鼓型塔和钢管杆的相间距约为5 m,可以进行无人机巡检。
5.2 导线类型局限
常见的导线类型有单分裂、双分裂、四分裂、六分裂及以上等。单分裂及水平布置的双分裂导线比较适合无人机检测,六分裂及以上导线布置较复杂,采用无人机检测时受限较大。
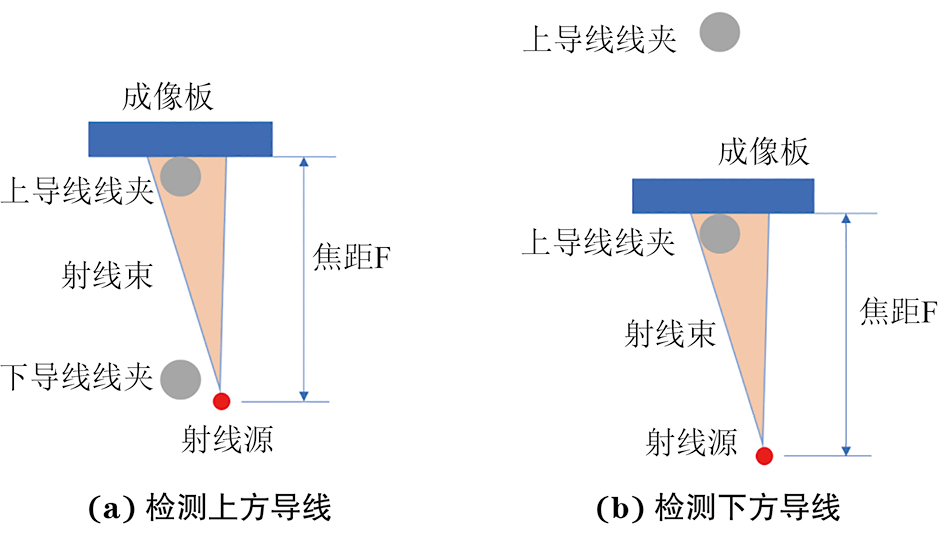
垂直布置双分裂导线的检测位置示意如图12所示,对于垂直分布的双分裂导线,检测上方导线较容易实现,成像板紧贴上方耐张线夹,通过调整焦距可以避免下方导线对射线束的遮挡[见图12(a)]。检测下方导线时,理论上直接将检测装置挂载到下方线夹处即可[见图12(b)],但上下导线间距一般为20~50 cm,受限于控制精度、飞手操作水平、天气状况等因素,实际操作时难度较大。
对于四分裂导线,可以看作两个并列的垂直分布双分裂线夹,检测时分别从导线的左侧和右侧挂载即可。
5.3 发展方向
针对现有装置的局限性,在未来有两种解决思路:① 在现有装置基础上优化设计,加装电机等实现成像板翻转,降低飞手在检测垂直双分裂导线下方线夹时的挂载操作难度;② 结合无人机和线路机器人技术,研制基于无人机技术的线路机器人,使其可以沿线行走并跨越防振锤及绝缘子等障碍物,实现多分裂导线、绝缘子等部件的隐性缺陷排查。
6. 无损检测证书挂靠网结语
为解决耐张线夹压接质量人工登塔作业中存在的难题,提出了“无人机+数字射线”检测技术,设计并制作了用于多旋翼无人机搭载的专用工装,采用基于FPV飞行技术辅助挂载的方式,实现了人工作业替代,并进行了工程应用,得出以下结论。
(1)采用FPV飞行技术辅助挂载的检测方式,可显著降低操作难度,使无人机替代人工作业成为可能。
(2)采用无人机作业,15 min可完成一座基塔的检测,效率极大提升。
(3)采用无人机搭载数字射线检测系统的方式检测耐张线夹,具有较高的可行性。无人机替代人工作业,可从根本上避免高坠伤亡事故,具有重要的社会效益。
推荐阅读:2025年无损检测证书挂靠价格趋势预测

